Situación
de elementos
1 al 14

Vista
de la mochila ubicada en la espalda y situación de los elementos de mando
local, controles de estado y antenas de comunicación, en el exterior del
cuerpo del robot.
Hacer "clic" en la imagen
para AMPLIAR detalles.
 |
Descripción
de elementos
1 al 14
-
Tapa
de acceso al interior de la cabeza: El altavoz primario y
los servos para elevación de cabeza, movimiento de ojos y
elevación cejas, están en el interior.
-
Electrónica
de control: Convertidor y visualizador de señales vocal a
óptico.
-
Antena
de recepción VHF. (principal): Señales de control.
-
Antena
de recepción UHF. Duplex: Trasmisión y recepción de audio,
vídeo y telemetría.
-
Antena
de recepción VHF. (secundaria): Señales de control.
-
Cable
bus y conectores DB-25: Suministro de datos y energía eléctrica a la cabeza del robot.
-
Servo
motor:
Giro de la cabeza, 6Volts - 12Wats - 2Amp.
-
Amortiguador
hidráulico: Compensador de la elevación y descenso del brazo.
-
Display
visualizador: Estado de baterías, tensiones y fusibles.
-
Conmutador
de emergencia: Parada instantánea de todos los servo motores y
circuitos eléctricos activos (reset).
-
Pomos
de apertura: Para el acceso al interior del cuerpo.
-
Módulo
de control del audio: Volumen de voz y conexión del sistema Full-Duplex.
-
Módulo
amplificador
de potencia de voz : Potencia de 30 W RMS a 12V,
para el sistema de audio.
-
Rodamiento
de la cintura: Rodamiento coaxial de bolas.
|
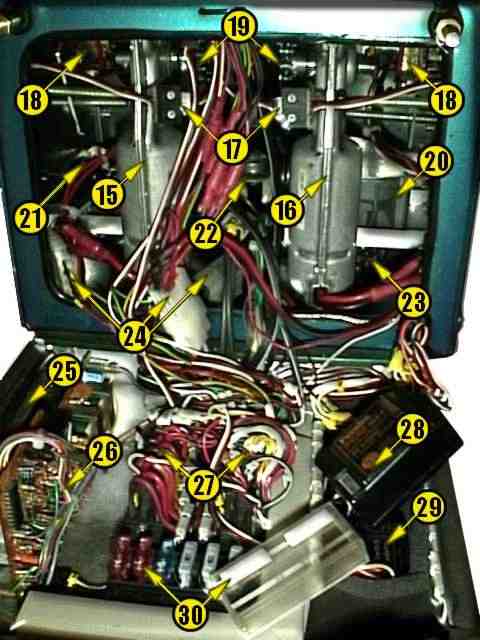
Situación
de elementos
15 al 30

Vista de la
distribución de los
componentes en el interior del cuerpo del robot.
Se
accede a los mismos, abriendo la tapa de la mochila situada en la espalda.
Hacer "clic" en la imagen para AMPLIAR
detalles.
|
Descripción
de elementos
15 al 30
-
Servo
motor:
Giro del brazo izquierdo, 12V - 80W - 7A.
-
Servo
motor:
Giro del brazo derecho, 12V - 60W - 7A.
-
Ajustes:
Posiciones extremas, servos de accionamiento (giro) de los brazos.
-
Electrónicas
de control: Servos de los brazos.
-
Trasmisiones
por piñón y cadena: Servos de los brazos.
-
Servo
motor:
Giro de la cintura, 12V - 60W - 5A.
-
Electrónica
de control: Servo de la cintura.
-
Captador
de posición: servo de la cintura.
-
Trasmisión
por piñón y cadena: Servo de la cintura.
-
Conectores:
Interconexiones del cableado.
-
Módulo
RF (full-Duplex): Trasmisión y recepción de audio, vídeo y telemetría.
-
Tarjeta
decodificadora: Adaptadora de señales de audio, vídeo y telemetría.
-
Repartidores:
Interconexiones y asignación de canales.
-
Receptor
de R.F. (PPM-PCM): Señales de control.
-
Módulos
decodificadores: Señales de control.
-
Caja
central de fusibles: Protecciones
para los diferentes circuitos.
|
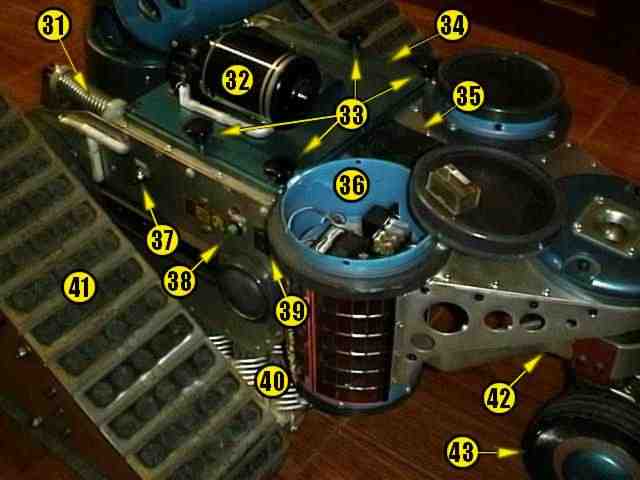
Situación
de elementos
31 al 43

Vista
de la plataforma de base y las orugas para desplazamiento. Las baterías están
en el interior y algunos sistemas del control electrónico de los motores de
tracción del robot.
Hacer "clic" en la imagen
para AMPLIAR
|
Descripción
de elementos
31 al 43
-
Amortiguadores:
Compensadores del mecanismo de elevación del pie central.
-
Servo
motor
elevador del pie: 12Volts - 180Wats - 15 Amp.
-
Pomos
de apertura: Para el acceso al interior del compartimiento de baterías
y control electrónico de tracción.
-
Tapa
compartimiento de baterías: Batería de tracción de 12Volts y
35Amp. Batería auxiliar de 6Volts - 12Amp.
-
Electro ventilador:
Refrigeración de sistemas internos.
-
Control
electrónico de dirección: Suministro de datos y corriente
eléctrica a los motores de tracción.
-
Protector
rearmable de 30A: Cortacorriente y protección de la batería de
12Volts.
-
Protector
rearmable de 5A: Cortacorriente y protección de la batería de
6Volts.
-
Conector
de recarga: Toma para recargar las baterías.
-
Plataforma:
Unión y chasis de las orugas y todo el sistema.
-
Cadenas
oruga: sistema de desplazamiento todo terreno.
-
Barras
oscilantes: Sistema de suspensión de las ruedas excéntricas.
-
Ruedas
soporte: Dos ruedas gemelas excéntricas, amortiguadas.
|
Situación
de elementos
44 al 56

Vista
medio plano frontal. Descripción de mecanismos, accionamientos y elementos
mas importantes.
Hacer "clic" en la imagen
para AMPLIAR
|
Descripción
de elementos
44 al 56
-
Foco
luz infrarroja: Para iluminación nocturna de la cámara de
vídeo.
-
Pestañas
móviles: servo motorizadas, se abren y cierran completamente.
-
Luz
roja: encendido al cerrar pestañas, ilumina lateralmente.
-
Mano
articulada: Dedos articulados y prensiles, con regulación de par
de fuerza electrónico.
-
Diodos
LED boca: De encendido secuencial al ritmo del sonido de la voz.
-
Amortiguadores
telescópicos:
Compensadores del mecanismo de elevación de la cabeza.
-
Servo
motor accionador mano: Reductor planetario y acoplamiento lineal.
(6Volts - 4Wats - 1Amp.)
-
Servo
motores movimiento brazos: Disponen de caja reductora de aluminio
y trasmisión por cadena de acero con tensor automático. (12Volts -
12Wats - 1Amp.)
-
Servo
motores movimiento hombros: Elevación hombro. Disponen de caja
reductora de aluminio y trasmisión directa. (12Volts - 12Wats - 1Amp.)
-
Articulación
del codo: Con sensor electrónico de posición incorporado y
rodamientos de bolas.
-
Módulos
electrónicos: control de servo motores.
-
Amortiguadores
hidráulicos:
Compensadores del mecanismo de elevación de los brazos.
-
Módulos
visualizadores LED: control de corriente consumida y reserva de
energía eléctrica.
|

|
|
DATOS
TÉCNICOS DEL
ROBOT Seguritron
|
Click
here

|
Contador visitas
|
|